An algorithm allows the states of certain quantum systems to be determined from data more quickly than was previously possible.
An algorithm allows the states of certain quantum systems to be determined from data more quickly than was previously possible.
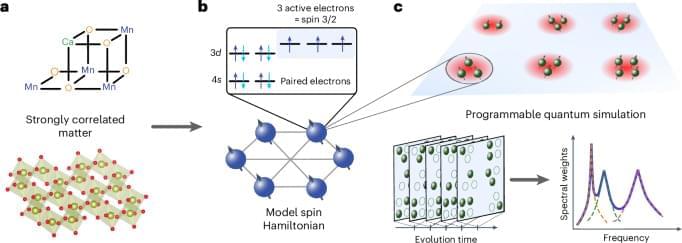
For example, to compute the magnetic susceptibility, we simply select the operator \(A=\beta {({S}^{z})}^{2}\), where β = 1/T is the inverse temperature. Interestingly, this method of estimating thermal expectation values is insensitive to uniform spectral broadening of each peak, due to a cancellation between the numerator and denominator (see discussion resulting in equation (S69) in Supplementary Information). However, it is highly sensitive to noise at low ω, which is exponentially amplified by e−βω. To address this, we estimate the SNR for each DA(ω) independently and zero-out all points with SNR below three times the average SNR. This potentially introduces some bias by eliminating peaks with low signal but ensures that the effects of shot noise are well controlled.
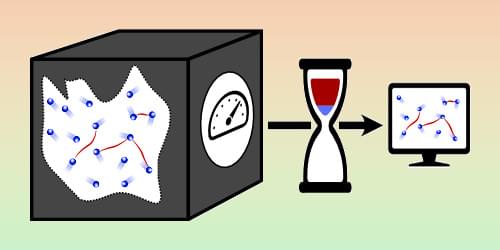
To quantify the effect of noise on the engineered time dynamics, we simulate a microscopic error model by applying a local depolarizing channel with an error probability p at each gate. This results in a decay of the obtained signals for the correlator \({D}_{R}^{A}(t)\). The rate of the exponential decay grows roughly linearly with the weight of the measured operators (Extended Data Fig. 2). This scaling with operator weight can be captured by instead applying a single depolarizing channel at the end of the time evolution, with a per-site error probability of γt with an effective noise rate γ. This effective γ also scales roughly linear as a function of the single-qubit error rate per gate p (Extended Data Fig. 2).
Quantum simulations are constrained by the required number of samples and the simulation time needed to reach a certain target accuracy. These factors are crucial for determining the size of Hamiltonians that can be accessed for particular quantum hardware.
Mathematics and physics have long been regarded as the ultimate languages of the universe, but what if their structure resembles something much closer to home: our spoken and written languages? A recent study suggests that the mathematical equations used to describe physical laws follow a surprising pattern—a pattern that aligns with Zipf’s law, a principle from linguistics.
This discovery could reshape our understanding of how we conceptualize the universe and even how our brains work. Let’s explore the intriguing connection between the language of mathematics and the physical world.
What Is Zipf’s Law?
The OS axiom posits that reality operates like a computational construct. Think of it as an evolving cosmic master algorithm—a fractal code that is both our origin and our ultimate destiny. This axiom doesn’t diminish the beauty or mystery of existence; on the contrary, it elevates it. When we think of the universe as a computation, we realize that the laws of physics, the flow of time, and even the emergence of consciousness are not random accidents but inevitable outcomes of this higher-order system.
This concept naturally leads us to the Omega Singularity, a term I use to describe the ultimate point of universal complexity and consciousness. Inspired by Pierre Teilhard de Chardin’s Omega Point, this cosmological singularity is where all timelines of evolution, computation, and consciousness converge into a state of absolute unity—a state where the boundaries between the observer and the observed dissolve entirely. In The Omega Singularity, I elaborate on how this transcendent endpoint represents not just the culmination of physical reality but the quintessence of the “Universal Mind” capable of creating infinite simulations, much like we create virtual worlds today.
But let’s take a step back. How does this all relate to the OS axiom? If the universe is computational, it means that all processes—be they physical, biological, or cognitive—are governed by fundamental rules, much like a computer program. From the fractal geometry of snowflakes to the self-organizing principles of life and intelligence, we see the OS postulate at work everywhere. The question then becomes: Who or what wrote the code? Here, we enter the realm of metaphysics and theology, as explored in Theogenesis and The Syntellect Hypothesis. Could it be that we, as conscious agents, are co-authors of this universal script, operating within the nested layers of the Omega-God itself?
Once the detection mechanism is refined, the next milestone would be to interface that optical signal with a small experimental crystal. The choice of crystal is not arbitrary. Labs might experiment with rare-earth-ion-doped crystals like praseodymium-doped yttrium silicate, known for their capacity to store quantum information for microseconds to milliseconds, or possibly even seconds, under specialized conditions. At an early stage, the device would not store large swaths of complex data but might capture discrete bursts of neural activity corresponding to short-term memory formation. By demonstrating that these bursts can be reliably “written” into the crystal and subsequently “read” out at a later time, researchers would confirm the fundamental principle behind Hippocampus Sync-Banks: that ephemeral neural codes can be transcribed into a stable external medium.
Of course, storing a fleeting pattern is just one half of the puzzle. To realize the Sync-Bank concept fully, the same pattern must be reintroduced into the brain in a way that the hippocampus recognizes. Here, scientists would leverage neural stimulation techniques. In theory, the crystal would “release” the stored patterns in the form of carefully modulated optical or electrical signals. Specialized interfaces near or within the hippocampus—perhaps using microLED arrays or sophisticated electrode grids—would then convert those signals back into the language of the neurons. If the signals are replayed with the correct timing and intensity, the hippocampus might treat them as though they are its own native memory patterns, thereby reactivating the memory. Experimental validation could involve training an animal to associate a particular stimulus with a reward, capturing the neural trace, and then seeing if artificially stimulating that trace at a later time recalls the memory even in the absence of the original stimulus.
Such experiments would inevitably confront thorny technical issues. Neurons and synapses adapt or “rewire” themselves as learning progresses, and the hippocampus is far from static. Overlapping memory traces often share neurons, meaning that reintroducing one memory trace might partially interfere with or activate another. To address this, scientists would need real-time feedback loops that track how the hippocampus responds to artificial signals. Machine learning algorithms might adjust the reintroduced signal to better fit the updated neural state, ensuring that the stored pattern does not clash with changes in the memory landscape. In other words, a second or third generation of prototypes could incorporate adaptive feedback, not just a one-way feed of recorded data. This type of refinement would be crucial to the user’s experience, because we do not simply recall memories as static snapshots; each time we remember something, our brains incorporate subtle new contexts and associations.
Our physics expert picks his top-five equations, plus a scheme to supply US power needs with a bucket of baseballs. Thanks, Einstein!
Infineon receives first Common Criteria EAL6 certification for implementing a post-quantum cryptography algorithm in a security controller.
Computers also make mistakes. These are usually suppressed by technical measures or detected and corrected during the calculation. In quantum computers, this involves some effort, as no copy can be made of an unknown quantum state. This means that the state cannot be saved multiple times during the calculation and an error cannot be detected by comparing these copies.
Inspired by classical computer science, quantum physics has developed a different method in which the quantum information is distributed across several entangled quantum bits and stored redundantly in this way. How this is done is defined in so-called correction codes.
In 2022, a team led by Thomas Monz from the Department of Experimental Physics at the University of Innsbruck and Markus Müller from the Department of Quantum Information at RWTH Aachen and the Peter Grünberg Institute at Forschungszentrum Jülich in Germany implemented a universal set of operations on fault-tolerant quantum bits, demonstrating how an algorithm can be programmed on a quantum computer so that errors can be corrected efficiently.

In today’s AI news, Mukesh Ambani’s Reliance Industries is set to build the world’s largest data centre in Jamnagar, Gujarat, according to a *Bloomberg News* report. The facility would dwarf the current largest data center, Microsoft’s 600-megawatt site in Virginia. The project could cost between $20 billion to $30 billion.
S most popular consumer-facing AI app. The Beijing-based company introduced its closed-source multimodal model Doubao 1.5 Pro, emphasizing a “resource-efficient” training approach that it said does not sacrifice performance. ‘ + And, OpenAI’s CEO Sam Altman announced that the free tier of ChatGPT will now use the o3-mini model, marking a significant shift in how the popular AI chatbot serves its user base. In the same tweet announcing the change, Altman revealed that paid subscribers to ChatGPT Plus and Pro plans will enjoy “tons of o3-mini usage,” giving people an incentive to move to a paid account with the company.
Then, researchers at Sakana AI, an AI research lab focusing on nature-inspired algorithms, have developed a self-adaptive language model that can learn new tasks without the need for fine-tuning. Called Transformer², the model uses mathematical tricks to align its weights with user requests during inference.
In videos, Demis Hassabis, CEO of Google DeepMind joins the Big Technology Podcast with Alex Kantrowitz to discuss the cutting edge of AI and where the research is heading. In this conversation, they cover the path to artificial general intelligence, how long it will take to get there, how to build world models, and much more.
Squawk Box Then, join IBM’s Meredith Mante as she takes you on a deep dive into Lag Llama, an open-source foundation model, and shows you how to harness its power for time series forecasting. Learn how to load and preprocess data, train a model, and evaluate its performance, gaining a deeper understanding of how to leverage Lag Llama for accurate predictions.
We close out with, CEO Sam Altman, along with OpenAI researchers and developers, Yash Kumar, Casey Chu, and Reiichiro Nakano as they introduce and demonstrate Operator, the new computer-user AI Agent from OpenAI.
Thats all for today, but AI is moving fast, subscribe today to stay informed. Please don’t forget to vote for me in the Entrepreneur of Impact Competition today! Thank you for supporting me and my partners, it’s how I keep NNN free.
Quantum entanglement—a phenomenon where particles are mysteriously linked no matter how far apart they are—presents a long-standing challenge in the physical world, particularly in understanding its behavior within complex quantum systems.
A research team from the Department of Physics at The University of Hong Kong (HKU) and their collaborators have recently developed a novel algorithm in quantum physics known as ‘entanglement microscopy’ that enables visualization and mapping of this extraordinary phenomenon at a microscopic scale.
By zooming in on the intricate interactions of entangled particles, one can uncover the hidden structures of quantum matter, revealing insights that could transform technology and deepen the understanding of the universe.
