Aug 18, 2021
Team develops AI to decode brain signals and predict behavior
Posted by Jason Blain in categories: information science, robotics/AI
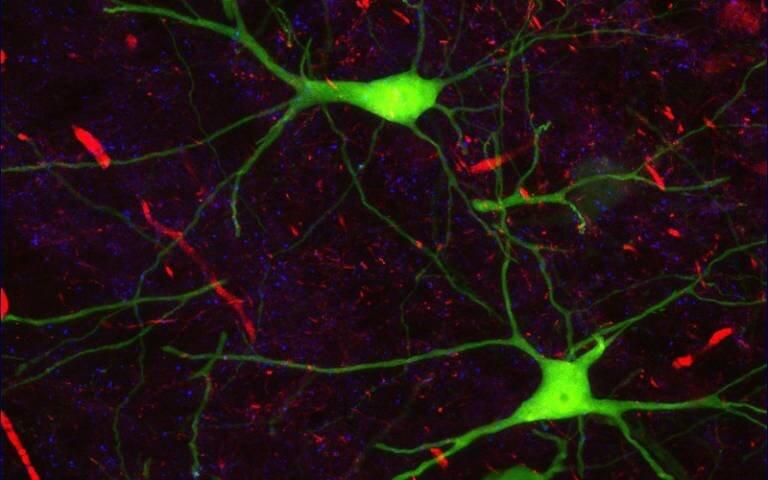
An artificial neural network (AI) designed by an international team involving UCL can translate raw data from brain activity, paving the way for new discoveries and a closer integration between technology and the brain.
The new method could accelerate discoveries of how brain activities relate to behaviors.
The study published today in eLife, co-led by the Kavli Institute for Systems Neuroscience in Trondheim and the Max Planck Institute for Human Cognitive and Brain Sciences Leipzig and funded by Wellcome and the European Research Council, shows that a convolutional neural network, a specific type of deep learning algorithm, is able to decode many different behaviors and stimuli from a wide variety of brain regions in different species, including humans.